
Xiaoyi Lin
About Me
Hi, I am Xiaoyi Lin, a second-year graduate student in Computer Engineering and research assistant at NYU. I received my Bachelor’s degree in Mechanical Engineering at Tongji University, Shanghai, China.
Technical Skills
- Programming Language: C++, Python, Matlab, ShellScript, sql, html, java, javascript
- Frameworks: TensorFlow, PyTorch, OpenCV, ROS, Django, React, Flask
- Software & Tools: Docker, CMake, scikit-learn, Git, OpenVSLAM, Solidworks, Ansys
Internship
-
C++ SDE Intern
Amazon Robotics, North Reading, MA
Adopted and implemented an up-to-date machine learning-based algorithm for collision detection using C++. Effectively integrated the algorithm with motion planning code base; reduced 5.4% overall computational expenses for each planning, improving collision checking run-time from ~1ms to ~100ns. Developed test strategy and conducted simulations on the Nvidia PhysX platform and AWS S3.

-
R&D Intern
Volkswagen, Shanghai, China
Improved a machine learning-based driver fitness determination system using Python. Resolved the overfitting problem by decreasing the sensitivity of RNN, reducing the error rate of blinking detection by 12%; Adopted CI/CD to deploy the system onto the flagship model VW Tiguan using C++ and AUTOSAR

Patterns
- [CN214128773U] Integrated end device for automatic needle inserting robot
- [CN112365489A] Ultrasonic image blood vessel bifurcation detection method
- [CN113111915A] Database enhancement method applied to vein insertion robot blood vessel identification
- [CN112381816B] Blood vessel puncture angle acquisition and puncture method based on image recognition and feedback control
Researchs
-
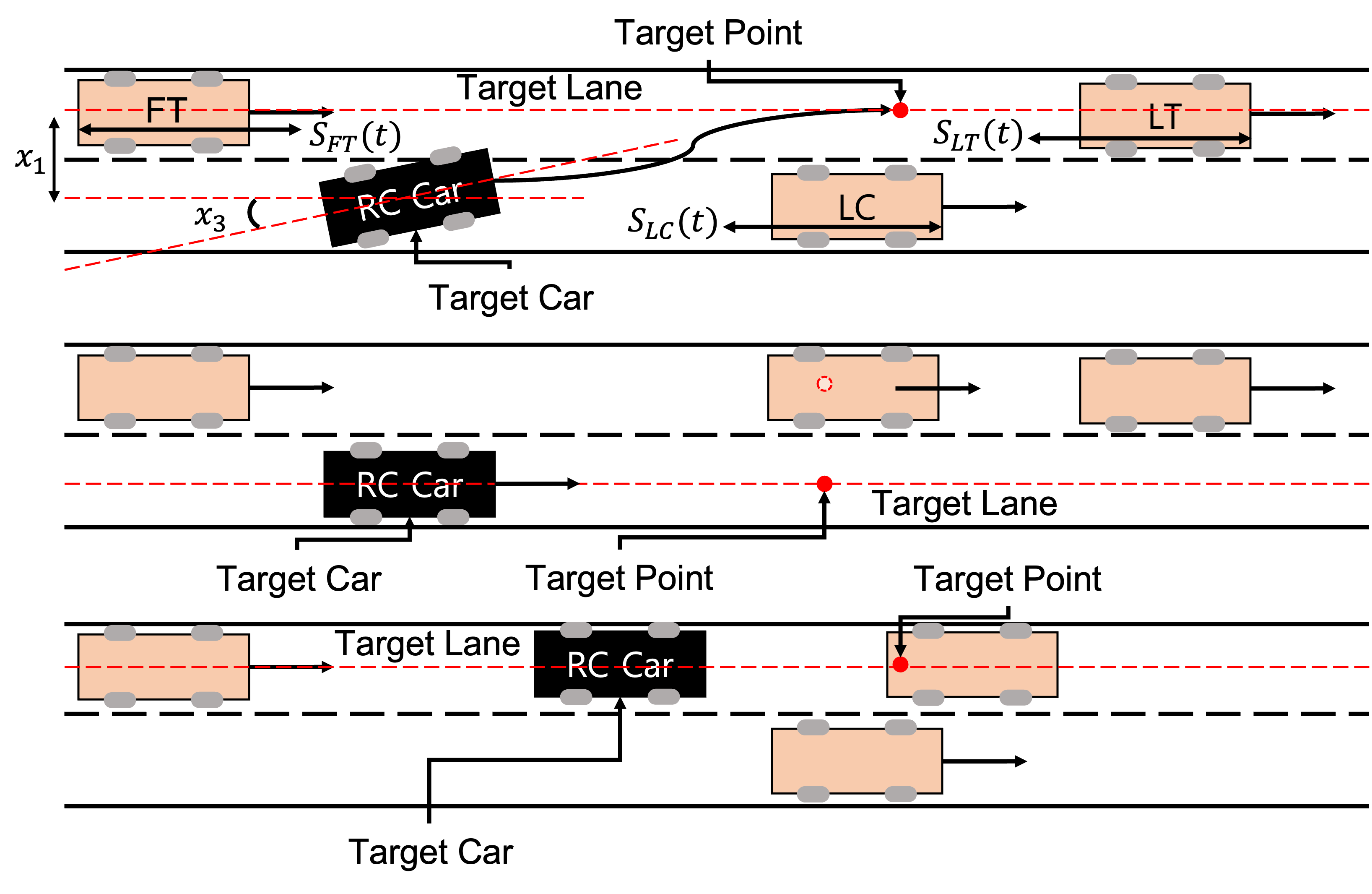 Control and Networks Lab, NYU
Control and Networks Lab, NYU -
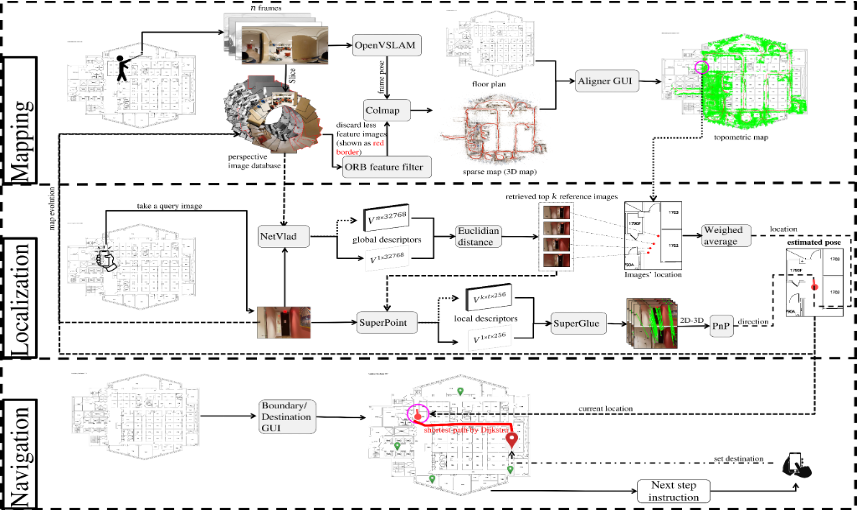 AI4CE Lab, NYU
AI4CE Lab, NYU -
 Oxford University, UK
Oxford University, UK -
 Tongji University, Shanghai, China
Tongji University, Shanghai, China